Роботы будут ориентироваться в пространстве при помощи эхолокационных датчиков

 Летучие мыши используют эхолокацию для ночных полетов Angell Williams/Flickr
Летучие мыши используют эхолокацию для ночных полетов Angell Williams/Flickr 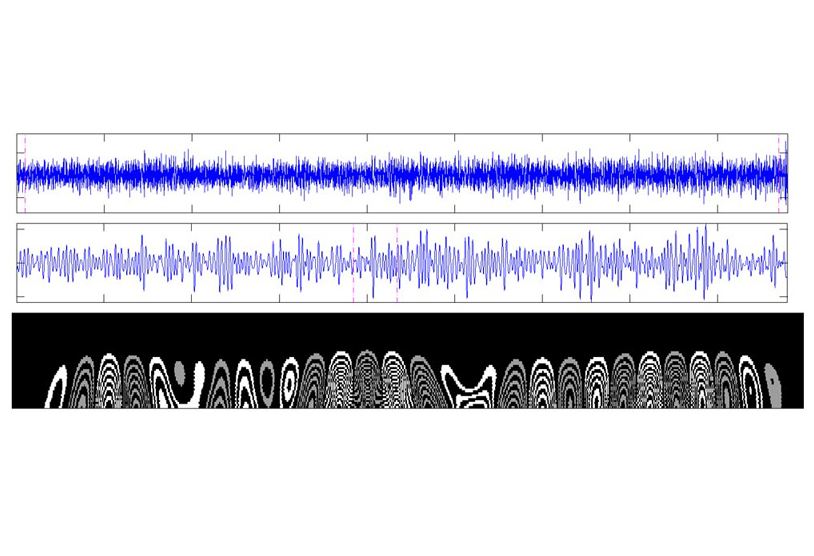 В одну секунду длинный звуковой сигнал, отраженный от автобуса (вверху) фильтруется (в центре) и в режиме реального времени за секунду превращается в изображение, которое напоминает набор отдельных отпечатков пальцев (внизу).
В одну секунду длинный звуковой сигнал, отраженный от автобуса (вверху) фильтруется (в центре) и в режиме реального времени за секунду превращается в изображение, которое напоминает набор отдельных отпечатков пальцев (внизу). В американском городке Канзас-Сити сотрудники Колледжа Уильяма и Мэри (Миссури) провели совещание относительно того, как в будущем в окружающем их пространстве смогут ориентироваться роботы. Дело в том, что сейчас машины способны контролировать свое состояние, исходя из данных лишь об объектах, которые находятся в непосредственной близости от них. Это нормально для роботов-пылесосов и домашних игрушек, но как быть с роботами, которые должны в силу своей специализации быстро перемещаться в пространстве или анализировать ситуацию вокруг себя на расстоянии в сотни метров, - например, боевыми машинами-солдатами?
Датчики "дальнего" наблюдения должны помогать роботам избегать дальних угроз - например, при движении по встречной полосе дорожного движения. Кроме того, существующие датчики не позволяют роботам одинаково хорошо ориентироваться в условиях плохой видимости - в тумане или поздно вечером. Использование же для этих целей тепловизоров - пусть самая очевидная, но далеко не самая эффективная и дешевая затея.
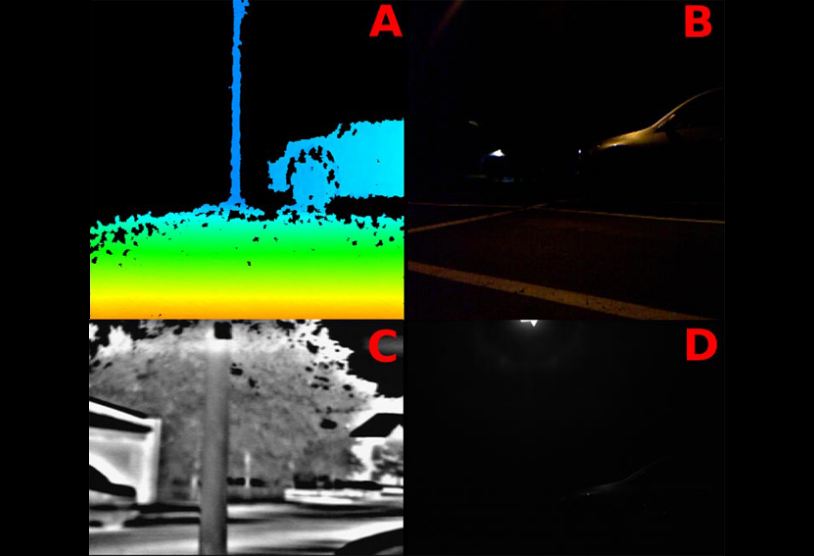 Ночью на улице система обнаруживает объекты при помощи RGB-спектра и данных с камеры-тепловизора. Эффективность сбора данных тут намного выше, чем у датчиков игрового контроллера Microsoft Kinect.
Ночью на улице система обнаруживает объекты при помощи RGB-спектра и данных с камеры-тепловизора. Эффективность сбора данных тут намного выше, чем у датчиков игрового контроллера Microsoft Kinect. Эксперты из Канзас-Сити считают, что будущее "глаз" роботов - эхолокационные датчики. Роботы будущего смогут ориентироваться в пространстве примерно так, как это сегодня делают летучие мыши, - посылая шумовой сигнал в окружающее пространство и отсчитывая время, за которое он вернется в виде эха. Такие датчики легко обнаруживают фонарные столбы, заборы, деревья, стены и другие преграды. Указанные системы уже прошли успешные испытания в "полевых" условиях. Вкупе с дешевыми инфракрасными датчиками и традиционными камерами эти системы позволят роботам без проблем ориентироваться в пространстве при любой скорости движения.
Так, эксперты создали платформу rMary, которая умеет собирать данные с подвижных и неподвижных транспортных средств, классифицировать их по типу (легковой автомобиль, внедорожник, фургон, грузовик, автобус или мотоцикл) и в связи с этим прогнозировать свои действия. Все это происходит при помощи датчиков эхолокации. Для пущей эффективности системы используются нелинейные акустические параметрические антенны, способны не только принимать, но и генерировать пучки направленного звука.
В рамках эксперимента ученые собрали 6000 отраженных сигналов в сорока различных теста. Машина тестировалась в разных условиях окружающей среды - при разной погоде, в местах с разным ландшафтом.
Смотрите также: Хирурги, танцоры, гиды, спасатели и другие роботы